Snakebot, a research robot, driven by multiple motors for the purpose of inspection and tool handling through small openings. This nth degree of freedom snake manipulator performs inspections in extremely narrow inaccessible areas. When equipped with special tools at its tip, it can cut, weld and perform other tasks. Learn more….

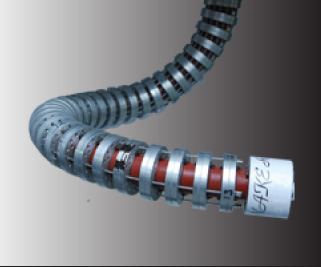
SnakeBot

SmartNav
SmartNav, a research robot designed & developed so that higher level algorithms can be tested on a small size platform before implementation on larger AGV’s. The robot boosts of a LRF, 16 sonar’s, PTZ camera, SBC etc. The embedded system was designed & developed in house. This became the primary platform for several development efforts. It was delivered to a leading research organization for their continued work in the area. Learn more….

Amria
AMRIA – AGV Platform powered by 2 wheels, independent suspension and a trailing wheel with suspension was designed, developed and delivered in less than three months. Subsequently a leading research organization then mounted their LRF, SBC and manipulator. The embedded system was designed & developed in house. This permitted the research institute to spend their valuable time in developing their higher level algorithms and finally deliver the project on schedule. Learn more….

SmartRod
SmartRod- AGV platform that carried a manipulator for ordinance disposal. Used extensively and completed its job of ordinance disposal within the stipulated time. The AGV is a four wheel drive with independent suspension. To guide the same an LRF, 24 sonar’s & multiple cameras were used. An Onboard SBC interfaced to the embedded system and was connected to a host computer using an Ether net wireless link. Learn more….